
新聞中心
產(chǎn)品中心
- >>兩相步進(jìn)電機(jī)
- >>無(wú)刷電機(jī)
- >>三相步進(jìn)電機(jī)
- >>行星減速機(jī)
- >>直流無(wú)刷電機(jī)
- >>兩相步進(jìn)驅(qū)動(dòng)器
- >>直流無(wú)刷驅(qū)動(dòng)器
- >>三相步進(jìn)驅(qū)動(dòng)器
- >>直流無(wú)刷伺服驅(qū)動(dòng)器
- >>韓國(guó)GGM電機(jī)減速機(jī)
聯(lián)系我們

深圳市東么川伺服控制技術(shù)有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區(qū)民治街道樟坑社區(qū)青創(chuàng)城A棟B502
步進(jìn)電機(jī)驅(qū)動(dòng)器應(yīng)用及工作原理之什么是步進(jìn)電
發(fā)布時(shí)間:2018-08-30 03:37:43
步進(jìn)電機(jī)驅(qū)動(dòng)器應(yīng)用及工作原理之什么是步進(jìn)電機(jī)?
什么是步進(jìn)電機(jī)
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度??梢酝ㄟ^(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器
雖然步進(jìn)電機(jī)已被廣泛地應(yīng)用,但步進(jìn)電機(jī)并不能象普通的直流電機(jī),交流電機(jī)在常規(guī)下使用。它必須由雙環(huán)形脈沖信號(hào)、功率驅(qū)動(dòng)電路等組成控制系統(tǒng)方可使用。因此用好步進(jìn)電機(jī)卻非易事,它涉及到機(jī)械、電機(jī)、電子及計(jì)算機(jī)等許多專業(yè)知識(shí)。 步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。隨著微電子和計(jì)算機(jī)技術(shù)的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個(gè)國(guó)民經(jīng)濟(jì)領(lǐng)域都有應(yīng)
步進(jìn)電機(jī)應(yīng)用
步距角的選擇:電機(jī)的步距角取決于負(fù)載精度的要求,將負(fù)載的最小分辨率(當(dāng)量)換算到電機(jī)軸上,每個(gè)當(dāng)量電機(jī)應(yīng)走多少角度(包括減速)。電機(jī)的步距角應(yīng)等于或小于此角度。目前市場(chǎng)上步進(jìn)電機(jī)的步距角一般有0.36度/0.72度(五相電機(jī))、0.9度/1.8度(二、四相電機(jī))、1.5度/3度 (三相電機(jī))
靜力矩的選擇:步進(jìn)電機(jī)的動(dòng)態(tài)力矩一下子很難確定,我們往往先確定電機(jī)的靜力矩。靜力矩選擇的依據(jù)是電機(jī)工作的負(fù)載,而負(fù)載可分為慣性負(fù)載和摩擦負(fù)載二種。單一的慣性負(fù)載和單一的摩擦負(fù)載是不存在的。直接起動(dòng)時(shí)(一般由低速)時(shí)二種負(fù)載均要考慮,加速起動(dòng)時(shí)主要考慮慣性負(fù)載,恒速運(yùn)行進(jìn)只要考慮摩擦負(fù)載。一般情況下,靜力矩應(yīng)為摩擦負(fù)載的2-3倍內(nèi)好,靜力矩一旦選定,電機(jī)的機(jī)座及長(zhǎng)度便能確定下來(lái)(幾何尺寸)
電流的選擇:靜力矩一樣的電機(jī),由于電流參數(shù)不同,其運(yùn)行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機(jī)的電流(參考驅(qū)動(dòng)電源、及驅(qū)動(dòng)電壓)
力矩與功率換算:步進(jìn)電機(jī)一般在較大范圍內(nèi)調(diào)速使用、其功率是變化的,一般只用力矩來(lái)衡量,力矩與功率換算如下:
P=Ω=2π·n/60
P=2πnM/60
其P為功率單位為瓦,Ω為每秒角速度,單位為弧度,n為每分鐘轉(zhuǎn)速,M為力矩單位為牛頓·米
P=2πfM/400(半步工作),其中f為每秒脈沖數(shù)(簡(jiǎn)稱PPS)
1、步進(jìn)電機(jī)是一種作為控制用的特種電機(jī), 它的旋轉(zhuǎn)是以固定的角度(稱為"步距角")一步一步運(yùn)行的, 其特點(diǎn)是沒(méi)有積累誤差(精度為100%), 所以廣泛應(yīng)用于各種開環(huán)控制。步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng), 這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器, 它是把控制系統(tǒng)發(fā)出的脈沖信號(hào)轉(zhuǎn)化為步進(jìn)電機(jī)的角位移, 或者說(shuō): 控制系統(tǒng)每發(fā)一個(gè)脈沖信號(hào),通過(guò)驅(qū)動(dòng)器就使步進(jìn)電機(jī)旋轉(zhuǎn)一步距角。所以步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比。所以,控制步進(jìn)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位目的;
2、步進(jìn)電機(jī)通過(guò)細(xì)分驅(qū)動(dòng)器的驅(qū)動(dòng),其步距角變小了,如驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)時(shí),其步距角只為‘電機(jī)固有步距角‘的十分之一,也就是說(shuō):‘當(dāng)驅(qū)動(dòng)器工作在不細(xì)分的整步狀態(tài)時(shí),控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖,電機(jī)轉(zhuǎn)動(dòng)1.8°;而用細(xì)分驅(qū)動(dòng)器工作在10細(xì)分狀態(tài)時(shí),電機(jī)只轉(zhuǎn)動(dòng)了0.18° ‘,這就是細(xì)分的基本概念。 細(xì)分功能完全是由驅(qū)動(dòng)器靠精確控制電機(jī)的相電流所產(chǎn)生,與電機(jī)無(wú)關(guān)。
3、驅(qū)動(dòng)器細(xì)分有什么優(yōu)點(diǎn),為什么一定建議使用細(xì)分功能?
驅(qū)動(dòng)器細(xì)分后的主要優(yōu)點(diǎn)為:完全消除了電機(jī)的低頻振蕩。低頻振蕩是步進(jìn)電機(jī)(尤其是反應(yīng)式電機(jī))的固有特性,而細(xì)分是消除它的唯一途徑,如果您的步進(jìn)電機(jī)有時(shí)要在共振區(qū)工作(如走圓?。x擇細(xì)分驅(qū)動(dòng)器是唯一的選擇。提高了電機(jī)的輸出轉(zhuǎn)矩。尤其是對(duì)三相反應(yīng)式電機(jī),其力矩比不細(xì)分時(shí)提高約30-40%。提高了電機(jī)的分辨率。由于減小了步距角、提高了步距的均勻度,‘提高電機(jī)的分辨率‘是不言而喻的。
產(chǎn)品推薦:兩相步進(jìn)電機(jī)





產(chǎn)品推薦:無(wú)刷電機(jī)






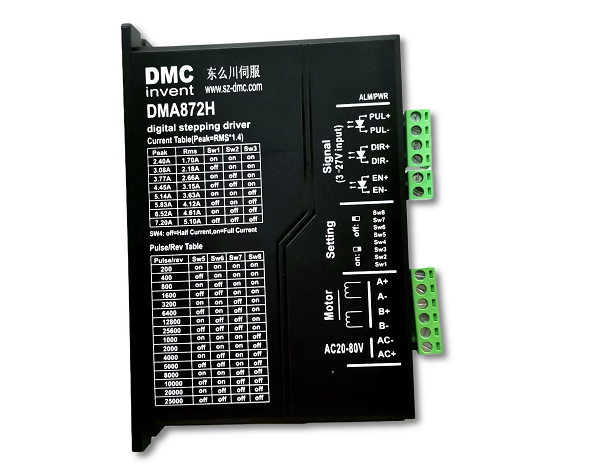
產(chǎn)品推薦:兩相步進(jìn)驅(qū)動(dòng)器







產(chǎn)品推薦:直流無(wú)刷驅(qū)動(dòng)器






 地址 ADDRESS
地址 ADDRESS